従来,クルマの電子制御はエンジン,ブレーキ,サスペンションといった部分ごとに行われていた。しかし,クルマの電子制御の進化に伴い,ブレーキとエンジン,あるいは変速機など,さまざまな部分を統合的に制御したいという要求が強まってきた。
複数の装置を連係動作させる
例えば最近のクルマでは,普及価格帯でも電動パワー・ステアリングや変速機,ABSの動作などを連動させるのが当たり前になっている。これらの機器はいずれも速度センサからの速度情報を必要としているが,それぞれの機器に速度センサから1本1本配線していたのでは煩雑になる。もちろん速度信号はスピード・メーターも必要としているし,最近の車種で搭載が増えているナビゲーション・システムも,速度信号を基にして現在位置を計算する。
別の例を挙げると,最近の車種ではリモコンでドアをロックしたりアンロックしたりすると,ウインカーが点滅するという機能がごく一般的になってきた。こうした機能を実現するためには,各ドアのロック機構以外に,ウインカーやメーターにもリモコンからドアロック信号を受信したことを伝えなければならない。
このように,車両各部の部品の相互の結び付きが強くなってきているため,それぞれの部分を1対1で結ぼうとすると配線が膨大になってしまう。これを回避するために,最近の車両に搭載されるようになってきたのが車載ネットワークである。これは1本の配線に,多彩な機器を制御するための信号を流す多重通信により,配線の増加を避けながらきめ細かい制御を可能にしようというものだ(図1)。
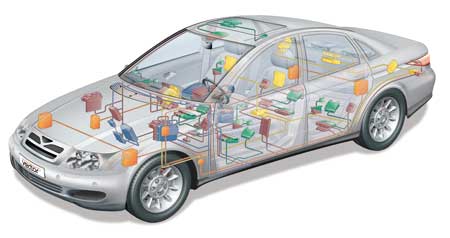
図1●ECU搭載状況の例
最近のクルマには搭載するECUの数が増え,多重通信のネットワークが必要になった。(図:ベクター・ジャパンのデータを基に作成)
標準規格となったCAN
車載ネットワーク規格で現在標準となっているのがCAN(controller area network)である。CANには,オフィスで使われるLANに比べて高い信頼性が要求されるため,以下のような特徴がある。1つは,マルチキャスト・マルチマスタ機能である。これは,バスが空いていればすべてのデバイスがメッセージを送信でき,同時にすべてのデバイスが受け取ることができる機能だ。
また,オフィスのLANでは複数のパソコンが同時にデータを送信した場合,データの衝突が起こる。このため,すべてのパソコンはいったん送信を中止して,後に送信を再度試みる。これに対しCANでは,メッセージに付加されたIDで優先度を定義することで,優先度の高いデバイスが送信を続ける機能を備える。
さらに,CANではネットワーク内のデバイスにアドレスを割り付ける必要はなく,通信内容(車両速度など)に付加されたIDにより認識する。このため新規にデバイスを追加/削除してもソフトウエアやハードウエアを変更する必要がなく,システムの柔軟性が高い。強力なエラー検出,エラー通知,リカバリ機能を備えるのも特徴の1つである。現在CANは,車両制御用の車載ネットワークの標準規格として,世界中の自動車メーカーが採用している。
このほか,小型車や軽自動車向けに低コスト化を目指した規格として,最大データ伝送速度が20kビット/秒の「LIN」がある。CANのサブネットワークとして位置付けられている。例えばドア・モジュール中のドア・ロックや電動ウインドウ,電動ミラーの制御など,主にボディ系システムに適用されている。
X-by-WireのためのFlexRay
しかし,今後ますます自動車のエレクトロニクス化が進展すると,CANの機能では不十分になる。これは,ステアリングやブレーキ,パワー・トレーンなどクルマの根幹の機能をエレクトロニクスに置き換える,いわゆる「X-by-Wire」化が進んでいるためだ。こうしたX-by-Wire化にCANは対応できない。このため,次世代の車載ネットワーク規格として提案されているのが「FlexRay」である。
CANで対応できない理由の1つは,信号の伝送速度の不足である。シャシー系の信号伝達では5Mビット/秒ほどの実効速度が必要になる見通しだが,CANの実効速度は500kビット/秒が限界とされる。これに対し,FlexRayのデータ伝送速度は最大10Mビット/秒と速く,シャシー系の信号伝達にも対応できる。
また,ブレーキなど車両の安全性を確保するための機能をネットワークによって実現することを考えると,データの遅延などに対する対策も必要になる。CANは「イベント・ドリブン型」と呼ばれる多重通信方式を採用している。これは,ネットワークに接続されたデバイスが必要に応じて伝送を行う方式。このため,あるデバイスが長くネットワークを使用していると,別のデバイスが通信できず遅延が生じてしまう可能性がある。
これに対しFlexRayは,あらかじめ定められたタイミングでデバイスごとに送信権が与えられる「タイム・トリガ型」の多重通信方式を採用している。このため,信号を送るタイミングに遅延が発生しないので,リアルタイム性が求められる用途に適する。
現在,FlexRayは各国の自動車メーカー,部品メーカー,半導体メーカーなどによって詳細な規格の策定が続けられている段階。既に,トヨタ自動車は将来の車両でFlexRayを採用することを表明しているが,車載ネットワークのすべてをFlexRayに置き換えるわけではなく,必要な部分のみに使うということになりそうだ。
マルチメディア向けは2規格が競合
このように,車体制御系のネットワークではCANからFlexRayへという流れがはっきりしているが,車内でDVDの映像などを楽しむためのマルチメディア用ネットワークは「MOST」と呼ばれる規格と「IDB-1394」と呼ばれる規格が競合しており,まだ行く末がはっきりしていない。
MOSTが欧州の自動車メーカーを中心に採用が進んでいる一方で,IDB-1394は,家電製品やAV製品などで採用が進んでいるネットワーク規格の「IEEE1394」を自動車にも応用しようというもので,家電/AV機器用に安く出回っている部品を活用できるという強みがある。
現在のところ,両陣営の歩み寄りによって一本化が行われるような動きは見られない。部品メーカーや機器メーカーは,しばらく様子見の状況が続きそうだ。














































