富士通研究所は、ドライブレコーダー向けに自動車に搭載された広角カメラで車線逸脱警報を実現する技術を開発した(発表資料)。
従来の車線逸脱警報は、白線を遠方まで映せる視野角30度程度の専用カメラを必要としており、近方の部分的な白線しか映らない視野角130度程度のドライブレコーダー用カメラでは車線を正しく検出できなかった。富士通研は、広角カメラで撮影した複数の画像から車線の形状を推定する技術を開発したことで、専用カメラなしに、ドライブレコーダーに車線逸脱警報機能を追加できるようにした。
従来、広角カメラの画像で車線逸脱警報を実現しようとした場合、車線の認識を誤りやすかったのは、車線が破線でかつ道路がカーブしている場合と、減速を促すために車線の内側に短破線の補助線が敷設されている場合。富士通研はこの2パターンに対応する車線形状の推定技術を開発した。
破線カーブ路にもリアルタイムに対応
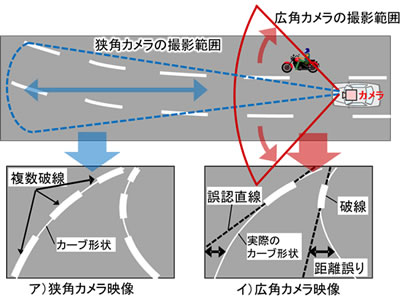
車線が破線で、かつ道路がカーブしている場合、狭角カメラでは、道に沿って複数の白線破線を観測できるが、広角カメラでは近方領域しか映らないため、左右1対の破線しか観測できない。破線は長さ8m程度と短いため、それだけではカーブ路の曲がり具合を判別できず、従来方式で広角カメラを使うと、カーブ路を直線路と誤認して車両と白線までの距離に誤りを生じていた。
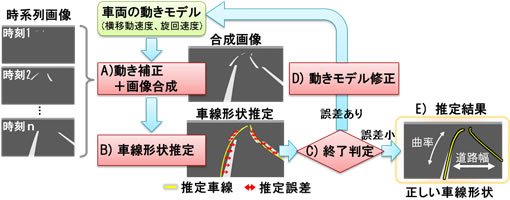
そこで、短時間では道路形状に変化が少ないことに着目し、例えば100msごとといった時系列の複数画像の破線をつなぐことで車線形状を復元することとした。自車両の移動によって白線位置は画像ごとにずれるため、車両の動きを横移動(等速移動)と旋回(等速旋回)でモデル化。時系列の白線画像から、動きモデルを用いて移動の影響を補正した路面合成画像を作成する。合成画像の白線から車線形状を推定するというものだ。
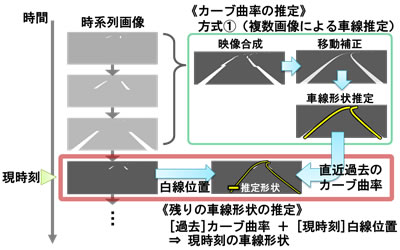
また、リアルタイム性を確保するため、カーブ曲率のみ、直近過去の車両前方の複数画像を用いて上述の方法で算出し、残りの車線形状(道路幅、車両向きなど)は、現時刻の単一画像から算出する方式も開発した。カーブ曲率は短時間では変化が少ないため、時間的に近い過去画像から算出しても車線形状の推定精度はほぼ劣化しないという。