本講座では,電気自動車や2足歩行ロボットなどの移動装備型製品で多用されているパワー・エレクトロニクスについて解説する。今回は,電源装置から放熱装置まで多様なシステムを搭載し,かつ小型軽量化が求められる移動装備型製品の特徴や開発体制の実態などを紹介する。(日経エレクトロニクスによる要約)
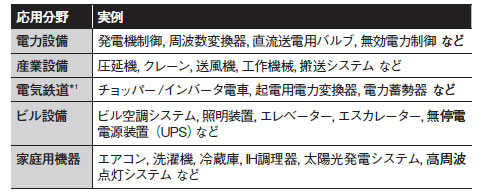
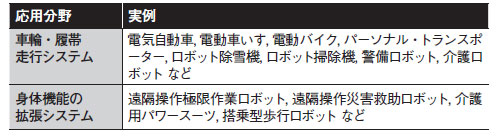
パワー・エレクトロニクス技術は半導体デバイスや制御技術などの進歩,さらには省エネルギーに代表される社会ニーズに支えられ,固定設備を中心に急速に進展してきた。従来は電力設備で使われるなど裏方的な存在だったが,今や身近な家電製品にまで応用されるようになった(図1,表1)。最近では,電気自動車や2輪のパーソナル・トランスポーターのような車輪走行システムのほか,2足歩行ロボットなどにも応用が広がりつつある(図2,表2)。


こうした移動装備型パワー・エレクトロニクス製品の大きな特徴は,電源コードや冷却配管がない自己完結システムで,小型軽量であることだ。本連載ではこれらを「モービル・パワー・エレクトロニクス」と呼び,モノづくり,特に概念設計のための巨視的な工学体系について解説する。
モノづくりの視点で見ると全体構想が複雑に
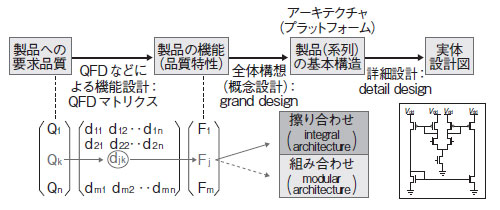
モノづくりの標準プロセスにおける設計とは,抽象的な要求仕様をモノの実体に変換していくプロセスで,大きく全体構想(概念設計)と詳細設計に分かれる(図3)。ここでアーキテクチャとは,部品のレイアウトや構成要素間の関係を表す用語である。これに対して,製品を支える下部構造の場合はプラットフォームと呼ぶ。モノづくりの観点から見ると,モービル・パワー・エレクトロニクスはアーキテクチャ全体の構想段階が複雑になる(図4)。具体的には,以下の通りである。
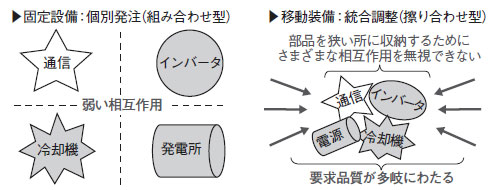
内部構造の複雑度が高い1)。
- 電源装置から放熱装置まですべての要素を備える。
- 効率よく移動するためには,装備が小型で軽い必要がある。
- 上記の理由から,部品のレイアウトや熱的/電磁気的な干渉が大きな問題になる。
品質要求の複雑度が高い1)。
- 機械と人間のインタフェースが多様で,顧客の要求も好みで分かれる。
- 固定設備と違って,移動するとさまざまな環境条件や運転条件に遭遇する。
- 製品に関する国内法規や国際規格,認証制度などが複雑に絡んでいる。
参考文献
1)Clark,K. B. et al.,“Product Development Performance-Strategy, Organization, and Management in the World Auto Industry,”Harvard Business School Press,1991.














































