2012年10月に開催されたエレクトロニクス技術の展示会「CEATEC JAPAN2012」。完成車メーカーでは“常連”の日産自動車が自動運転技術を披露したほか、今回初めて出展したトヨタ自動車は、手ぶりなどのジェスチャーで車両を操作する技術を提案した。
日産は自動運転技術を採用した電気自動車(EV)「NSC-2015」を試作し、自動で駐車場に入って駐車し、出入口に戻ってくるまでの様子を会場内で実演した。
NSC-2015のベース車はEV「リーフ」。まず運転者が乗車した状態で自動で動かし、駐車枠の少し手前の停止線で止める。車両の前後左右に取り付けた四つのカメラで、車線や停止線を認識する。運転者が降りた後にスマートフォンで駐車を指示すると、自動で駐車枠に入れる。運転者が駐車場の外に出た後で再びスマホで出入口から指示すると、駐車枠から無人で車両が発進し、運転者の位置まで自動走行する。駐車中に不審者が近づくとカメラで検知し、スマートフォンを通じて所有者に知らせる機能もある。
四つのカメラの映像データをデジタル信号で電子制御ユニットに送り、ステアリングやブレーキ、アクセルなどを制御する。なお、今回の実演では車速を5km/hまでに制限した。
トヨタは、身ぶりや手ぶりで車両のドアを開けられるEVのコンセプト車「Smart INSECT」を披露した(図)。トヨタ車体製の1人乗りEV「コムス」をベースに開発した。実用化の時期は未定だが、「搭載した機能の一部は1~2年以内にも導入できる」(トヨタ常務役員の友山茂樹氏)とする。
以下、『日経Automotive Technology』2013年1月号に掲載
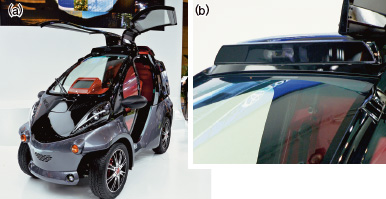
図 トヨタのコンセプト車「Smart INSECT」
(a)トヨタ車体の1人乗り電気自動車(EV)「コムス」をベースに開発した。音声や身ぶり、手ぶりに基づいて車両を操作。(b)Microsoft社のゲーム機に使う画像センサを用いた。














































