
|
第9回:機構・機能の概念設計(4) |
|
超音波で壁との距離を検出 |
|
文●茶運び人形実行委員会 |
運び人形の移動制御において,最下層となるのが車輪(駆動輪)の制御である。これら車輪の駆動にはステッピングモータを使い,同モータの駆動周波数や駆動総パルス数をあらかじめ目標とした値で動作させることによって,茶運び人形の回転速度や移動距離を制御する。すなわち,開ループでのプログラム制御を行うのである。
ただ,こうしたプログラム制御を行うには「初期位置と目標位置を決定する」あるいは「経路の途中で現在位置と進行方向を確認する」ことが同時に求められ,そのための手立てが不可欠となる。要するに,位置や角度などを求めるためのさまざまなセンサを配置し,そうしたセンサの信号を用いてステッピングモータの制御に対してフィードバックをかける必要が出てくる。(以下,「日経ものづくり」2007年12月号に掲載)
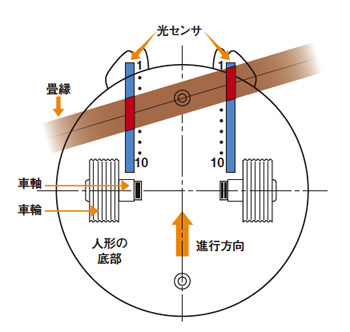
図●光センサによる畳縁の検出
本連載第3 回の図5を再掲。畳縁を左右2列の光センサで検出し,位置情報の修正を行うと同時に,左右2列の検出位置の差から畳縁に対する角度も算出する。
【「日経ものづくり」の年間購読および一冊購入の申し込み】
【定期購読者限定サービス(無料):記事検索/PDFダウンロード】

















































