|
前田育男,関野芳雄,岡田和也 |
第7回:生産設備のリスクアセスメント/低減方策(1) |
|
作業者の視点で安全を確保する |
今回から2回にわたり,ロボットを
使った生産設備のリスクアセス
メントおよびリスク低減方策の具体的
な流れを説明する。今回は「自動運転
モードにおけるリスクアセスメント」,次
回は「メンテナンスモードにおけるリス
クアセスメント」を扱う。以下,ロボット
を使った自動組立設備を新規導入す
るという設定で話を進める。
対象設備の初期状態を図に示し
た。使用条件は次の通りである。
●垂直多関節(6軸)ロボットを使い,
ワーク1をワーク2に自動で組み込む。
●ワーク1と2は,コンベヤで運ばれてく
る。このコンベヤは,電動式フリーフロー
とする。
●設備のモードは,自動運転モードとメ
ンテナンスモードの2種類とする。
●ロボットの可搬質量は6kg(高出力タ
イプ)とする。
●ロボット・コントローラは,ロボット制
御専用とする。
●制御盤では,起動/停止,機械の設
定,モード(自動運転/メンテナンス)の
切り替え,条件設定などの設備全体の
制御をスイッチ操作で行う。
(以下,「日経ものづくり」2007年10月号に掲載)
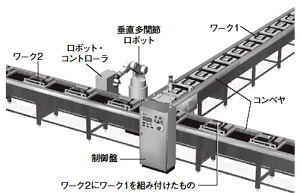
図●ロボット生産設備の初期状態
安全の観点からの配慮はあまりなされていない。『安全コンセプトブック』を基に作成した。
【「日経ものづくり」の年間購読お
よび一冊購入の申し込み】
【定期購読者限定サービス(無料)
:記事検索/PDFダウンロード】

















































