IoT(Internet of Things)のクルマへの応用。その一つが、走行中の周囲の状況をセンサーで把握し、危険回避に向けて運転者を支援するといったものだ。今回は、その肝となる画像認識技術について、デンソーアイティーラボラトリの研究例を解説してもらう。(本誌)
事故だけでなく、ヒヤリハットさえも起こさない運転(「あんしん運転」)。デンソーアイティーラボラトリでは、そうした運転の実現に向け、新技術の開発を進めている。乗る人の気持ちに寄り添い、周囲の状況に気を配れるクルマ。そんなクルマを実現するには、車の目となる画像認識技術が欠かせない。そこで、今回は、あんしん運転の実現に向けて当社が開発を進めている三つの画像認識技術を紹介する。
高速・省メモリーの物体認識技術
クルマの運転中に、運転者が注意しなければならないものはたくさんある。例えば、歩行者、他のクルマ、二輪車、道路標識である。これらをクルマの側が自動的に認識し、危険を伴うときにはそれを教えてくれたら、運転者はとても安心だ。
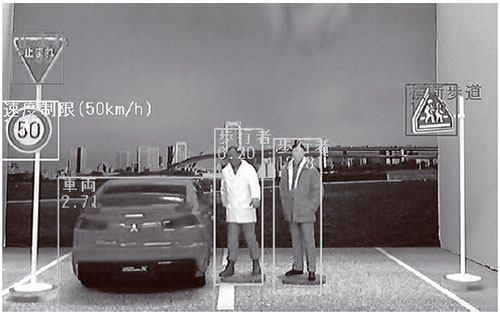

こうした認識から当社が開発したのが、多くの物体をリアルタイムで認識する技術「SPADE」(Scalar Product Accelerator by integer DEcomposition、図1)だ。処理速度が速く、使用するメモリーが少なくて済む点が特徴で、それを可能としたのが「特徴量の2値化処理」だ。一般的な画像認識処理では、カメラから入力した画像に対して、辞書に登録したパターンと似た“もの”を探し出す(図2)。辞書は学習によって作られ、学習では画像の中の“もの”のパターン、例えば輪郭の点などをコンピューターに教える。このパターンを特徴量という。通常、特徴量のデータは大きいため、認識の処理時間は長くなり、大きなメモリーが必要となる。
そこで当社では、従来、実数で表記していた特徴量を+1と-1の2値で表記する(2値化処理という)技術を開発。これにより、特徴量の大きさを低減し、処理速度の向上(45倍)とメモリー量の低減(1/32倍)を果たした。














































