
|
車載ネットワーク入門・最終回 |
|
次世代の車載LAN |
|
前回は、自動車にECU(Electronic Control Unit)や車載LAN、そして現在では車載LANのデファクトスタンダードとなったCANが導入された経緯について述べた。今回は、次世代車載LAN規格のFlexRayについて解説する。 |
|
フリースケール・セミコンダクタ・ジャパン |
これまで、車載LANが生まれた主な背景としてECUの増加を挙げた。ECUの搭載が増えている要因として、ある日本の自動車メーカーの技術者が「車載用モータの数と相関関係がある」という興味深い見方を示していた。
例えば、ある上級車では、搭載するモータ57個に対してECUが50個だという。一方の普及車では、モータが21個なのに対して、ECUが28個だった。1対1にならないのは、1つのECUでモータを複数個制御するケースがあるからで、モータの数が増えるとECUの数も増えるという傾向が読み取れる。
CANの普及と限界
ECUの増大に対処するために、特に欧州の自動車メーカーは積極的に、車内配線のネットワーク化を進めてきた。車種によっては搭載するECUが70個を超えており、そのために1997年から異なるバス・システムを接続する「ゲートウエイ」という装置も導入したほどだ。車載LANの代表格であるCAN(Controller Area Network)が導入されて10数年たつが、ECUはさらに増加傾向にあり、そのため、以下のことが課題になってきている。
・アプリケーション間の連携が増えている
・ネットワークの通信データが増加している
・ネットワーク・トポロジ(形態)が複雑になっている
・将来に向け新しいアプリケーションが増加している
これらの課題を解決するために欧州の自動車メーカーは、さまざまな議論をしてきた。こうした課題が、もはや1社では解決しきれないところまできてしまったからだ。
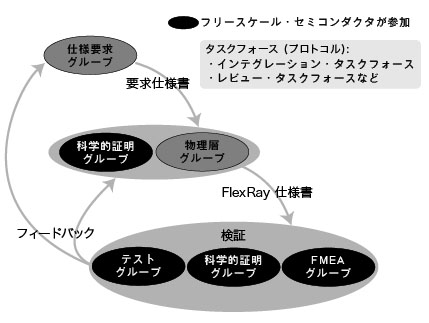
図●FlexRayのワーキンググループの構成













































