究極の自動車と言える自動運転車の開発に、世界の企業が取り組み始めた。意外なのは、自動車開発とは無縁に思える米Google社が先頭を走ることだ。同社のスマートフォン事業で成功したビジネスモデルを、自動車の世界に持ち込む狙いが透けて見える。自動車メーカーはGoogle社を警戒しつつ、開発のアクセルを踏み始めた。(清水 直茂)
Part1:変わる自動車の価値
自動運転車は諸刃の剣
トヨタの苦悩、Googleの野望
センサと情報処理技術の進化を背景に、自動運転車の開発競争が始まった。実現すれば、自動車の最大の課題である交通事故を大きく減らせる。しかし、自動車メーカーにとっての未来はバラ色とは言い切れない。自動車の価値の源泉がハードウエアからソフトウエアに大きく転換するからだ。そんな将来に逡巡する自動車メーカーを尻目に、米Google社が台頭している。
自動運転車の開発を進めたいのに躊躇している─。
2013年1月に米国ラスベガスで開催された世界最大のエレクトロニクス関連の展示会「International CES 2013」。トヨタ自動車による無人での自動運転を実現する実験車の発表では、同社が苦悩する姿が浮き彫りになった。
発表の場で新しい技術の利点をじっくり説明するわけでもなく、持ち時間の45分のうちわずか10分強で説明を切り上げた。その上、無人で走れる実力がある実験車を披露したにも関わらず、「自動運転を目指した車両ではない」(トヨタ)とちぐはぐだ。
外観は無骨だが、技術的には高い水準に達する車両である(図1)。自信を持ってアピールするのにふさわしいものだ。トヨタの態度が煮え切らないのはなぜなのか。

Part2:自動車メーカーの取り組み
技術開発の中心は米国
追いかける欧州と日本
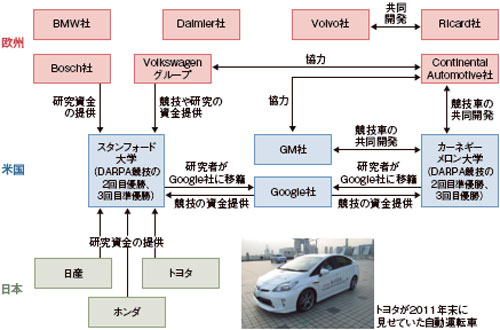
米国防総省の競技をきっかけに、米国での開発環境が一気に整い始めた。一般道での公道実験を許可するなど開発を後押しし、米Google社を先頭で走らせる。自動車メーカーでは米GM社がいち早く実用化の時期を宣言した。一方で欧州はドイツVWグループが米国の協力を得ながら追いかける。日本はトヨタを中心に少しずつ対応し始めた。
トヨタ自動車が自動運転技術の発表の場として、米国ラスベガスで開催された「International CES 2013(CES)」を選んだのには二つの理由がある。
一つは、開発を進めるのに必要な研究者やメーカーの協力を得やすくすること。トヨタは「外部の人材の協力が欠かせない」とみる。
自動運転車の実現に重要な技術は、センシングと情報処理である。CESは世界で最も大きなエレクトロニクス関連の展示会で、これらの分野に自動車メーカーよりも詳しい研究者やメーカーが多く集まる。協力者を探すのに格好の場所と言える。
もう一つは、CESの開催地が米国であることだ。現在、自動運転技術の開発に最も積極的な国である(図1)。関連する人材が豊富なうえ、制度面での強い後押しがある。今のところ米国の関係者にアピールしなければ開発を進めにくいのが実状だ。トヨタに限らず、欧州の自動車メーカーも米国の協力を得ながら開発を進めている。
Part3:実現に向けた技術
インフラを変えずに自車位置推定
汎用パソコンの計算能力で実現
自動運転車を実現する要の技術が自車位置を正確に推定することだ。予め用意した地図と米Velodyne社製センサによって、インフラを変えずに推定する技術が登場したことが状況を大きく変えた。しかも汎用のパソコンで計算できるほど、情報量は少なくてすむ。あとは経路をどう計算するのか。危険度を予測して車両制御に生かす研究などが進む。
米Google社をはじめ、米GM社、ドイツVolkswagenグループ、トヨタ自動車、日産自動車などの自動運転技術を開発するほとんどの企業が購入するセンサが、米Velodyne社製のレーザレーダ「HDL- 64e」である(図1)。車両の屋根に置けば、周囲360度で垂直視野26.8度の3次元空間にある物体との距離を測れる。円筒の中にレーザ素子を縦に64個置き、約20Hzの周期で回して実現する。
約900万円と高いので商品には使えない。それでも自動車メーカー各社がこぞって買うのは、Velodyne社のレーダが、自動運転技術に対する根強い“思い込み”を覆したからだ。各社はこれまで、道路やGPS(Global Positioning System)などのインフラを大きく変えなければ自動運転車は実現しないと考えていた。
自動運転車の実現に重要なのは、自車の位置を正確に推定する技術だ。過去の自動車メーカーの研究の多くが、例えば道路へのマーカの設置やGPSの精度を高めることなど、インフラの変更を前提として自車位置を推定していた。道路やGPS衛星の変更には巨額の資金が必要なうえ、公共物なので一企業では進められない。結局、研究した成果は“お蔵入り”するしかなかった。

Part4:運転者主権のあり方
事故の責任を負うのは誰か
第三者に委託する議論が始まる
自動運転が実現すれば、「運転者主権」の考えを変える必要が出てきそうだ。もはや運転の主体が人にあるとは言えないからである。では誰が事故の責任を負うのか。人のままか、それともメーカーか。自動化の水準に応じて責任のありかは変わりそうで、各国で議論が始まっている。日本では国土交通省が責任を第三者に委託する仕組みの議論を始めた。
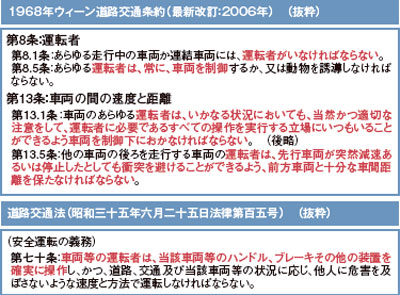
自動運転の実用化に向けて、すべての技術者が大きな課題と口を揃えるのが「運転者主権」の問題である。運転者主権とは「クルマを運転する主体は運転者である」とする考えのこと。欧州の各国が加盟するウィーン道路交通条約や日本の道路交通法などにはこの考えに基づいた条文がある(図1)。
自動車メーカーにとって運転者主権の考えは重要である。事故が起きた場合の責任が原則として運転者にあるとみなせるからだ。仮に自動車メーカーが責任を負う「メーカー主権」ではリスクが大きすぎて車両を販売できない。
しかし、自動運転が実現するとクルマを運転する主体が“運転者”とはみなしにくく、責任の所在が曖昧になる。そのときに誰が責任を負うのか。現在、自動運転時の運転者主権のあり方について各国で議論が始まっている。各国に共通する認識が、「自動化の水準」に応じて責任の所在を分類する必要があることだ。