「メカトロ講座」は,茶運び人形の開発をテーマに,一連の作業を疑似体験することで,メカトロ機器の開発手法を体得できるように狙った企画です。
茶運び人形では,これまで紹介してきたように,走行や茶碗の上げ下ろしなどにステッピングモータを使う。ひと口にステッピングモータといってもさまざまなタイプのものがあるが,ここではPM(永久磁石)型ステッピングモータの利用を想定している。茶運び人形における走行や茶碗の上げ下ろしという動作では,高速回転が求められない。そのため,モータの価格や入手性を優先してPM型を選定する予定だ。今回は,そうしたPM型のステッピングモータの駆動方法について解説する(表)。
〔以下,日経ものづくり2009年8月号に掲載〕
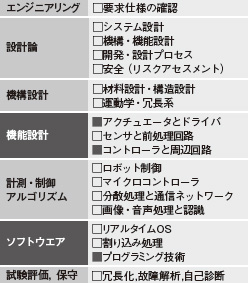
表●開発設計の各過程で必要となる検討項目
今回は,機能設計における「アクチュエータとドライバ」「コントローラと周辺回路」,ソフトウエアにおける「プログラミング技術」について取り上げる。
【茶運び人形実行委員会プロフィール】
大島泰毅:大島設計事務所所長
専門分野は冶工具・自動化機械設計。東芝・生産技術研究所,東芝セラミックスで治工具,金型設計,製造設備の開発設計に従事。
井出川 洋:技術士(応用理学部門)
専門分野は計測,安全・PL(製造物責任)関連。東芝で分析装置,センサ,メカトロ装置,昇降機の開発設計に従事。
里中新一:電子機器メーカー勤務
専門分野は計測制御・電子回路。東京工業大学修士課程修了後,東芝にて計測制御機器の開発設計に従事。現在は電子機器メーカーで事業企画に携わる。
大畠 覚:ラグビーセンサ社長
専門分野はセンサ応用製品のシステム開発,組み込み機器の開発。東芝にてMEMS(Micro Electro Mechanical Systems),計測機器,防犯カメラシステム商品の開発に従事。

















































