前回に引き続き,今回も茶運び人形を製作していく工程を視野に入れながら詳細設計に向けての方針を整理していく(表)。今回は,茶運び人形の機能設計を中心に見ることにする。加えて,そうした機能を実現する上で有用な超音波センサについて解説する。
不可欠な適応力や対話力
我々が目指す茶運び人形は,前回も触れたように半東の役割を代行する自律型のロボットである。従って,そうした自律性を満足させる能力も同時に求められる。
例えば,状況が少しでも変化するたびに,ロボットがいちいちお手上げ状態になって人間に助けを求めているようでは,とても自律的とはいえない。それ故,そうした状況の変化に対応できるだけの知能や適応力といったものが不可欠である。(以下,「日経ものづくり」2008年5月号に掲載)
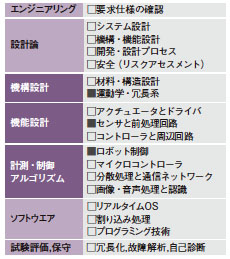
表●開発設計の各過程で必要となる検討項目

















































