今回から詳細設計編に入る。初めの数回で,前回までの概念設計編を総括しつつ,茶運び人形を製作していく工程を考慮に入れながら詳細設計に向けての方針を整理していく(表)。
我々が目標としている茶運び人形は,茶室で半東の役割を代行するロボットである。動作開始のタイミングなど亭主からの指示を必要とするところもあるが,基本的には外部から人間が操縦するタイプのロボットではない。自らの動きはすべて,内蔵するコンピュータで計算/制御しながら動くタイプのも のだ。(以下,「日経ものづくり」2008年4月号に掲載)
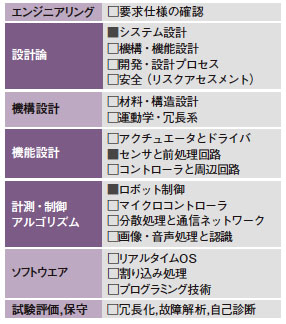
表●開発設計の各過程で必要となる検討項目

















































