打ち上げ時の衛星は電源オフ
超小型衛星は一般にロケットに搭載された時点では電源オフの状態で、ロケットから切り離されて軌道に投入されたときにオンになる(コールドローンチ)。軌道投入された直後は、必要最小限の機能のみが有効なセーフモードで動作し、消費電力を抑えて日照の間に確実に充電されるようにする。
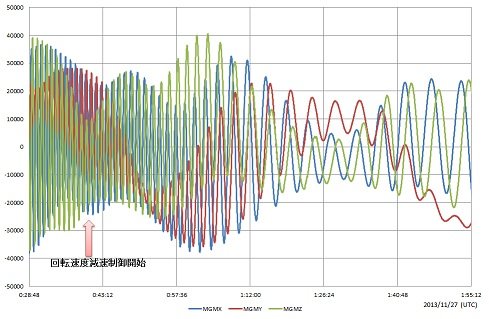
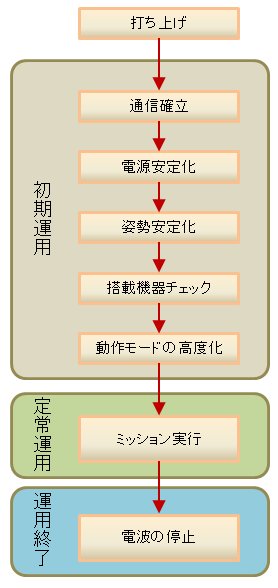
衛星をロケットから切り離す際、衛星に回転が生じることがある。そこで電源の安定が確認できたら、姿勢を安定化(=回転を止める)する作業に入る。超小型衛星では無指向性アンテナを使用してどのような姿勢でも通信できるようにすることが多いが、衛星の回転が止まると、フェージング*が低減してより安定した通信が可能になる。姿勢の安定化後は、センサやアクチュエータなどの各搭載機器の動作を確認し、徐々に高度な動作モードにシフトして、ミッション実行が可能な状態に近づけていく。
打ち上げから安定してミッションを実行できる状態にするまでが初期運用で、初期運用が終わると、ミッションを実行する定常運用に移行する。そして、設計寿命あるいはミッションが実行できなくなるまで衛星を使用し、運用が終了する。運用終了段階では、衛星のデータ送信を停止させ、推進系などの軌道制御機器を搭載している場合は、デブリ化(宇宙ゴミになること)防止のために、軌道を離脱(高度を落として最終的に大気圏に突入させて燃やす)させる。
12月上旬現在、WNISAT-1は姿勢を安定化させて搭載機器の動作を確認している段階である。最新の運用状況を弊社ブログ(http://www.axelspace.com/special/)で紹介しているので、ご興味ある方はご一読いただきたい。
なお、大型衛星の場合は初期運用のシーケンスがやや異なり、軌道投入後に自動的に姿勢を安定化させて太陽電池パドル(太陽光を受ける羽根のような板)を展開し、姿勢を太陽方向に向けることをセーフモードと呼ぶことが多い。このため、セーフモードであっても、姿勢を測定して太陽方向に制御する機能が必要となり、これらの機器には高い信頼性が求められる。
一方、民生技術の採用などで部品や機器自体に高い信頼性を求められない超小型衛星では、衛星の各面に太陽電池を貼って、どのような姿勢でも発電と通信をできるようにする。こうすることで、セーフモードに必要な機能を絞り込み、より宇宙でサバイバルしやすい設計にする。これは自動車と飛行機のセーフモードに似ているかもしれない。自動車の場合、トラブルが生じたら、とりあえず路肩に一時停止すれば安全で、この間にトラブル原因を調べたり対処する時間的猶予が得られる。一方の飛行機の場合は、不具合発生時には停止させずに高度を一定に保った水平定常飛行に入る。操縦系統やエンジン出力など、最低限の動作に必要なハードルが高く、燃料の残量などの時間的猶予も少ない。このため、重要な機能はすべて冗長化されている。もちろん超小型衛星でも部分的に冗長設計を採用する場合があるが、一般論として対照的な設計思想と言えるだろう。