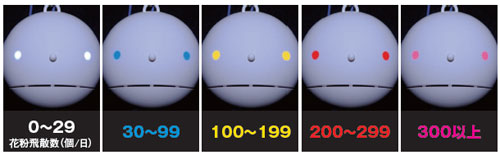
この季節の気象情報とくれば,ご想像の通り,花粉である。口のように見えるすき間から空気を取り込み,その中に含まれる花粉の数をセンサで測定する。花粉がほとんど飛んでいない,具体的には人が1日に吸い込む花粉数が0~29個/日だと,目の色は白。さらに増えると青から黄,赤と変化し,300個/日以上になると紫に怪しく光りだす。
この花粉観測機は,英語で花粉を意味するpollenとロボットを組み合わせた「ポールンロボ」と呼ばれている。もちろん,この展示スペースで実際の測定を行うのではなく,ウェザーニューズが観測者を募って全国に700台設置する。一般家庭のほか,学校や病院からの応募が多いという*。同社は,花粉症対策のために「花粉プロジェクト」を展開しているが,花粉飛散状況がリアルタイムで分かるポールンロボは,同プロジェクトの主役になる。
*今シーズンは2009年末から観測者に配布を始めた。前のページの展示スペースには,取材した2月上旬の段階で残っていた100台強がつるされていた。

花粉プロジェクトがスタートしたのは2005年で,現在のポールンロボは5代目に当たる。初期のものは花粉とホコリを厳密に区別できなかったり,直径が約30cmと大きくて設置スペースを取ったりしたが,改良を重ねて現在のタイプに落ち着いた。
花粉観測の仕組みはこうだ。花粉は同ロボの内部のファンを回すことで,前述のように口に当たる横長のすき間から入ってくる。測定ユニットは花粉の進入口から徐々に広がっていく構造とし,その上部にはセンサが設置してある。ファンによって軽い花粉が吸い上げられる一方,ホコリは比較的重いので下に落ちる。ここで,花粉とホコリの1次スクリーニングを行う。
センサは,レーザ光の散乱を利用する方式。対象物に半導体レーザ光が当たった際,散乱される光の偏光特性によって花粉かそれ以外のホコリ類かを識別できる。花粉は偏光が変化する度合いが小さくホコリは大きいので,識別精度は高いという。ここでもホコリが花粉としてカウントされることを防止する。
観測した花粉数は,人の呼吸量を考慮して人が1日に吸い込む花粉数に換算する。この花粉数に応じて目の位置に組み込んだ発光ダイオード(LED)の色を変化させるのだ。夜間にリセットされるので,朝の目の色は常に白。花粉が多い日は,時間とともに白から青,黄,赤,紫といった5段階で目の色が変化していく。

このようにして同ロボが観測したデータは,インターネット回線を通じて1分ごとにウェザーニューズに自動送信され,そのデータに基づいた花粉の飛散情報が同社のWebサイトに表示される。これにより,花粉の飛散状況がリアルタイムで分かるのである。

















































