車いすを使う上での不便の一つに,ベッドから車いすへ移る際の煩わしさがある。新しい乗り物の形状は,まさにこの課題の解決を目指したものだ*2。
*2 開発に当たっては,九州大学病院リハビリテーション部の高杉紳一郎氏のアドバイスを受けた。
従来の車いすでは,後ろ向きに座って背もたれに寄り掛かる。言ってみれば,車いすに後ろから「抱っこ」されるわけだ。ところが,新しい乗り物には背もたれがない。利用者は,前を向いたまま後ろから乗り込み,座面と胸の前のパネル,ひざ下の部品に体重を預ける。つまり,「おんぶ」された状態になるのだ。
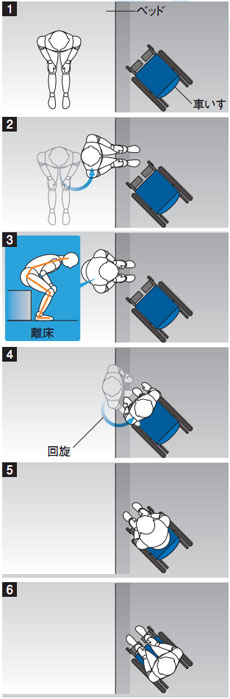
前のページのピクトグラムにある通り「抱っこからおんぶへ」と乗り方を変えることで,移乗の手間は随分と軽減される。具体的に,その違いを見てみよう。まずは,被介助者がベッドから従来の車いすに移る場合。
1 あらかじめ介助者が,ベッドに対して車いすを斜めに配置しておく。
2 被介助者は,上半身を起こしてから約90°回り,ベッドの縁に浅く腰掛ける。
3 被介助者は,前傾して重心を前方へ移してから,立ち上がる(離床)。
4 被介助者は,必要なら介助者の援助を受けて回旋し,車いすに背を向ける。
5 介助者は,被介助者の臀部を車いすの上まで動かし,重心を後ろに移してからゆっくりと腰掛けさせる。
6 介助者は,車いすの背後に回り,被介助者を深く座らせる。
特に3 4では,介助者が被介助者を支え,自らも回転しながら回旋させるため,双方に大きな負担となる。加えて,5で着座するときの衝撃を少なくするためには,徐々に腰を下ろす必要があるので,その間,介助者は被介助者の体重を支え続けなければならなかった。
これに対して新しい乗り物では,移乗手順が以下のようになる。
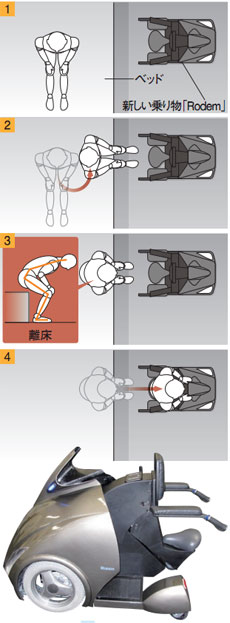
1 介助者が,ベッドに対して真っすぐ乗り物を配置する。
2 被介助者は,上半身を起こしてから約90°回り,ベッドの縁に浅く腰掛ける。
3 被介助者は,前傾して重心を前方へ移してから,立ち上がる(離床)。
ここまでは,車いすのときとほぼ同じだ。違うのは,次である。
4 被介助者は,必要なら介助を受けながらそのまま前進し,搭乗する。
あとは,前面のボタンで座面の高さを調節し,手元のジョイスティックを操作すれば,行きたい方向へと自在に進める。
簡単に乗れて,簡単に動ける。これによって被介助者の自立度が高まる。身も心も前向きにしようという狙いだ。
こうして乗り込みやすさを高めた乗り物に,今後は各種センサなどを搭載し,ロボットとしての機能を追加していく計画である。その過程では,安全性の向上,背もたれがないことによる不安感の払拭といった課題に対応していくことになりそうだ*3。
*3 2009年中には製品モデルを発表し,翌2010年の発売を目指す。車いすの代替品のみならず,健常者の日常的な乗り物としても販売する計画だ。

















































