「回遊的思考」の次元
前回の第6話でブレークスルーのイノベーション理論を展開した。ここでは「有機半導体トランジスタによる事業創造」を例にしながら、ゴール設定した技術と既存技術との乖離を正しく評価して「パラダイム持続型」で行けるか、「パラダイム破壊型」を取らねばならないかを見究めることを論じた。そしてこれを、技術の「目利き力」の第1のパターンと呼んだ。
すべての「目利き力」がこの第1のパターンで説明できるわけではない。ARM社の場合がその好例になる。本連載の第3話で論じた内容をもう一度思い出してみよう。
明らかに市場を支配する力があったにもかかわらず、なぜ日立はARM社の後手にまわったのか。この解について、榊原の理論を紹介した。彼は、「新技術」に対して、それがイノベーションにまで成就するには、その後の「意味の洞察」が重要だと説く。日立は、この「意味の洞察」を怠った。日立のRISCチップはARM社のRISCチップより機能が高く幅広い可能性を生んでしまい、かえって「低消費電力がビジネスの鍵になる」ことを洞察できなかったというのだ。
この議論には、イノベーション・ダイヤグラムをもちいると、さらに深い含蓄を与えることができる。以下、これについて説明する。
イノベーション・ダイヤグラムにおける「知の具現化」の次元だけ取り出して考察しよう。この次元のサブ構造として「演えき的思考」(Deductive thinking)の次元と「回遊的思考」(Transilient thinking)の次元とに分解して、それを図6のように2次元空間で表現するのである。ただし「演えき的思考」の次元を縦に取っておく。
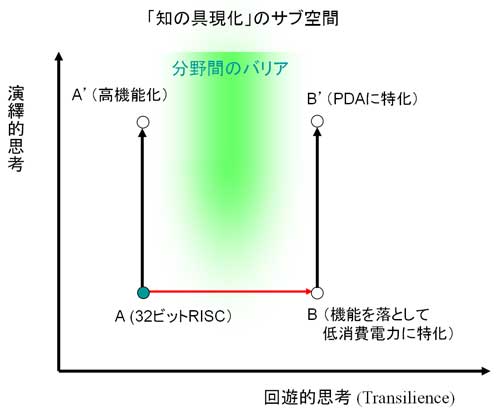
ほとんどの場合、「知の具現化」という知的営為は既存の「知」を統合して価値づけるプロセスとして「演えき的思考」を選び取る。たとえば、マイクロプロセサの設計においては、図6のA→A’のように、RISCアーキテクチャという境界条件が与えられた場合、マイクロプロセサの旧来の評価軸上で高速かつ高機能なものを設計していくのがアーキテクトの正統的方法論であるからだ。
それに対して「回遊的思考」とは、A→Bのように、分野をまたぎながら異なる評価軸を探していく思考のことをいう。技術の高みを追求することを放棄して、一見「ちぐはぐ」に見える低消費電力性を追求するというのは、当時のマイクロプロセサの設計では亜流ともいえることであって学界のメインストリームからは評価されなかったであろう。しかしハウザーの力強いリーダーシップは、技術陣を敢えて主流分野とは異なる評価軸の世界にジャンプさせた。

















































